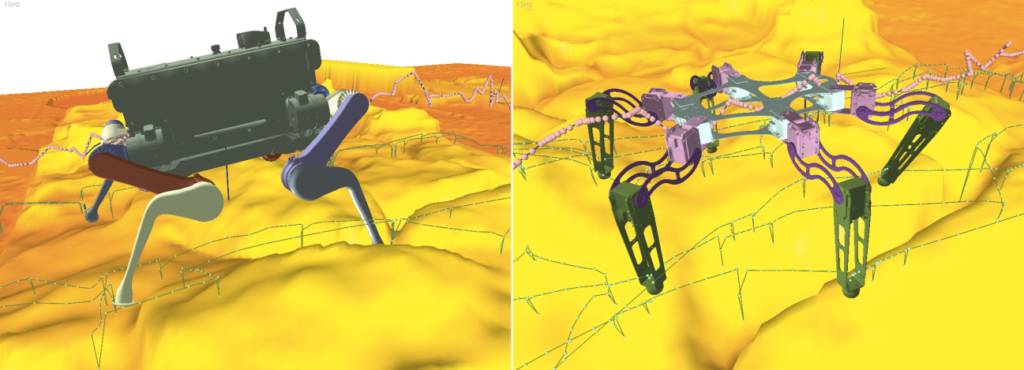
In this paper, we deal with the problem of full-body path planning for walking robots. The state of walking robots is defined in multi-dimensional space. Path planning requires defining the path of the feet and the robot’s body. Moreover, the planner should check multiple constraints like static stability, self-collisions, collisions with the terrain, and the legs workspace. As a result, checking the feasibility of the potential path is time-consuming and influences the performance of a planning method. In this paper, we verify the feasibility of sampling-based planners in the path planning task of walking robots. We identify the strengths and weaknesses of the existing planners. Finally, we propose a new planning method that improves the performance of path planning of legged robots.
[1] Dominik Belter, Informed Guided Rapidly-Exploring Random Trees*-Connect for Path Planning of Walking Robots, Proceedings of the 17th International Conference on Control, Automation, Robotics and Vision (ICARCV), December 11-13, 2022, Singapore, s. 709-714, 2022

{kind=link}
{kind=link}
{kind=link}