
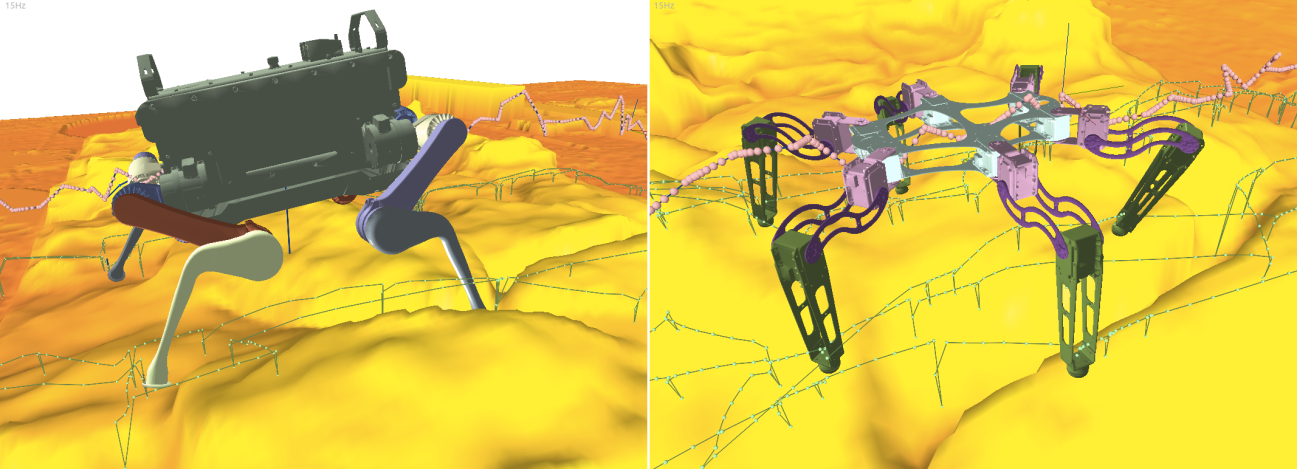
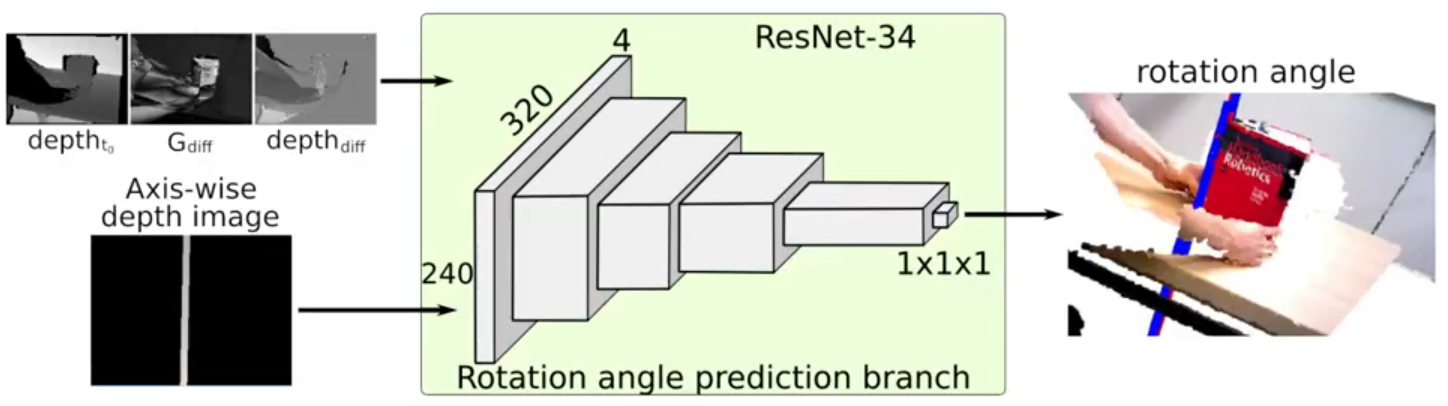
Mastering rough terrain locomotion is a tough challenge for robots due to its dynamic, unpredictable nature and frequent physical contact. Traditionally, robots rely on carefully planned foot placements to maintain grip and stability. Recent advancements in quadruped robot feet offer diverse shapes and high grip for various terrains. However, control systems and planners often struggle to leverage these varied capabilities, relying instead on simplified foot models e.g., ball-like, flat. The simplified feet models committed to the single shape of the foot can not be used on robots equipped with diverse feet or modern adaptive feet. This work proposes a novel foothold optimization method that efficiently searches for optimal contact points for different foot shapes using a polynomial approximation. The system leverages a Convolutional Neural Network (CNN) trained on simulated data to predict a cost for each candidate foothold. We show that a single neural network can work with different and new foot mechanical designs without retraining the system. We experimentally validate our system on the ANYmal robot using both ball feet and adaptive soft feet, in indoor and outdoor environments, finding that our system improves stability, in terms of pitch and roll angles of the base, with respect to a state-of-the-art method.
[1] S. Tolomei, D. Belter, J. Bednarek, F. Angelini and M. Garabini, \textit{Learning-Based Foot-Shape-Aware Foothold Selection for Quadrupedal Robots}, in IEEE Transactions on Systems, Man, and Cybernetics: Systems, doi: 10.1109/TSMC.2025.3563974

{kind=link}
{kind=link}
{kind=link}
{kind=link}