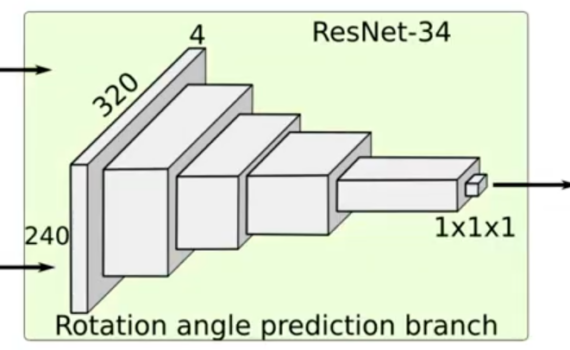
In this research, we investigate the problem of state estimation of rotational articulated objects during robotic interaction. We estimate the position of a joint axis and the current rotation of an object from a pair of RGB-D images registered by the depth camera mounted on the robot. However, the camera […]
Daily Archives: 6 March 2023
1 post